
Project Description

- Developing a solution allowing the analysis of turbine disc that is holding the blades
- Inspection of turbine discs using cameras and artificial intelligence to determine if there are any small cracks or defects that could damage the engine
- Design a system/process to remove human error from this inspection and speed it up as it is a timely procedure

Solution Generation
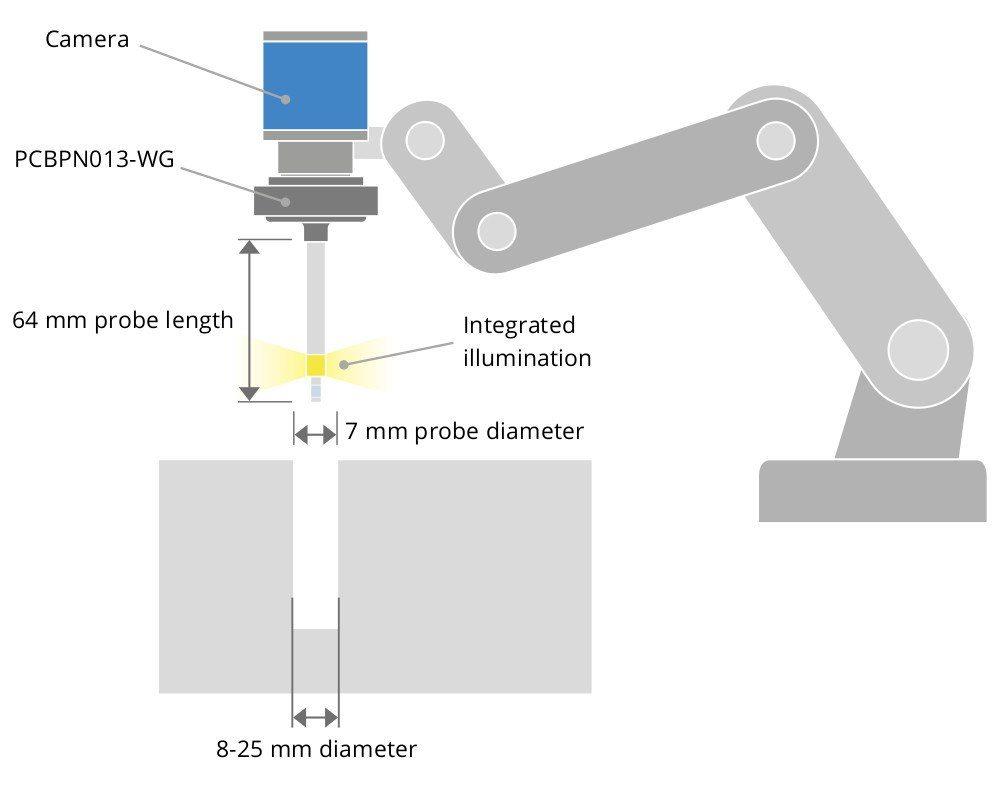
360° Optics
Approach:
Use small, 360-degree camera to capture internal geometry
Explanation:
- Come at the dovetail from the top of flat surface
- Treating dovetail as two separate ‘holes’, combining photos to show entire internal face as one long photo
Pros:
- Easy to operate
- Time efficient
- Produces wrapped and unwrapped images
- High quality resolution
- On-board lighting provided.
Cons:
- Not sure how 360 camera will work with non-circular object
- Little information found online
- Complicated integration with current GE solution
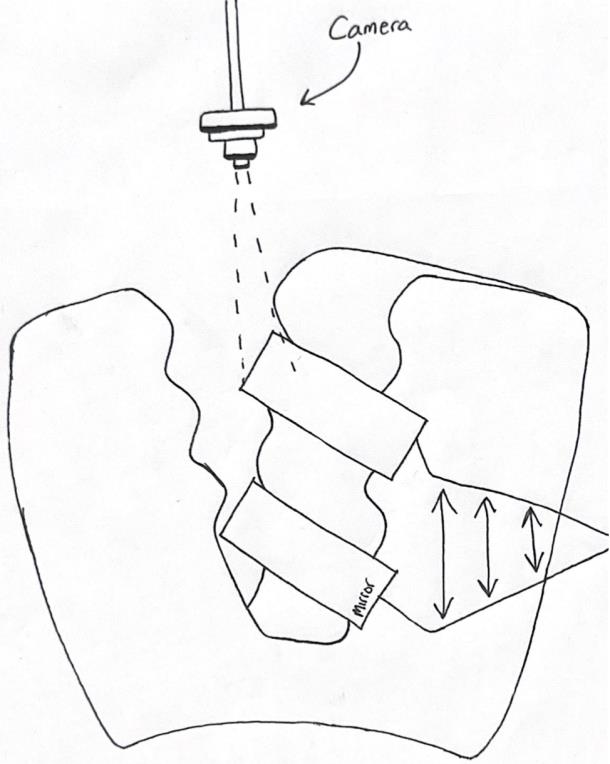
Light Reflection
Approach:
Camera scanning from above dovetail, capturing the full image with the help of mirrors
Explanation:
- Use of line scan camera to first have an overview of the dovetail
- Process would be repeated with use of mirrors to capture hidden parts of the dovetail
- For a 2 notch dovetail we would need 5 passes.
Pros:
- Use of GE line scan camera (no need for miniature, expensive technologies)
- Not expensive
- Precise image location, leading to easier image stitching.
Cons:
- Loss of qualities through mirrors
- Added complexity to create a 2D image (stitching of images through mirror)
- Time consuming
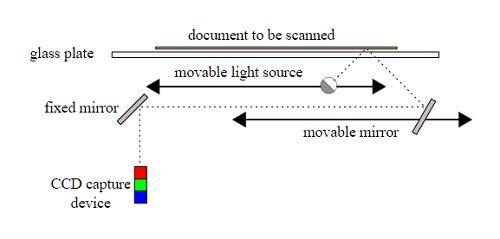
Scanner Method
Approach:
Using a scanner mounted in the robot arm, we can do precious scanning based on the shape of dovetail and generate the grayscale image
Explanation:
- Commercial scanner with a high resolution
- The shape of dovetail is fixed, the robot arm can move along with the surface by pre-programming the route
- Scanning will be continuous, fast, and stable
- Scanner already has built-in white light.
Pros:
- High Resolution
- Live, direct image output
- Built-in White Light
- No image stitching needed
Cons:
- Hard to design
- Require lots of component design
- No experiment supporting
Team Members





Faculty Mentor
